Overview
This project designed and implemented a layered fault-tolerant control system for a hexacopter drone, integrating firmware customization, FPGA-based adaptive logic, and real-time fault detection. The software architecture spans three layers — physical actuation, ArduPilot flight firmware, and custom FPGA control logic — communicating via serial protocols to achieve resilient autonomous flight.
The system demonstrates fault tolerance through redundancy: when a motor degrades, the FPGA control layer detects the anomaly and redistributes thrust in real time, maintaining stable flight without operator intervention.
Project Implementation
This project implemented a feedforward, fault-tolerant design using:
- A hexacopter (radio-controlled multirotor helicopter with six rotors)
- ArduPilot autopilot firmware
- Nexys 4 FPGA development board
The hexacopter provides six degrees of freedom through independent control of each rotor’s speed, enabling stable flight even when one rotor fails (fault tolerance through redundancy).
System Architecture
The system was designed in three layers:
- Hardware layer — Physical hexacopter frame with ESCs (Electronic Speed Controllers) and BLDC motors
- Flight control layer — ArduPilot running on APM hardware handling stabilization, GPS, and navigation
- FPGA control layer — Nexys 4 FPGA providing custom logic for mission-specific adaptation

FPGA Architecture
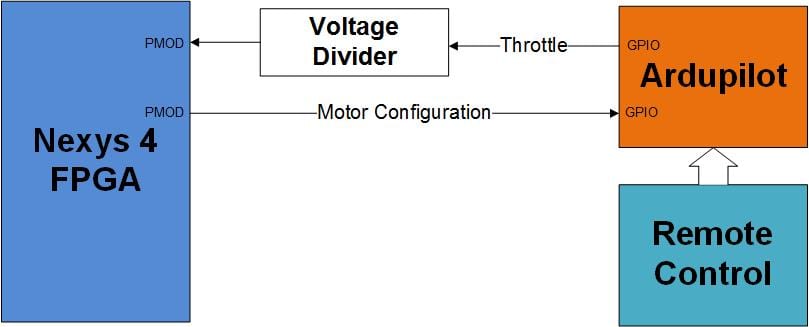
The Nexys 4 FPGA interfaced with ArduPilot via serial communication, enabling:
- Custom waypoint processing
- Sensor fusion for adaptive behavior
- Fault detection and motor compensation logic
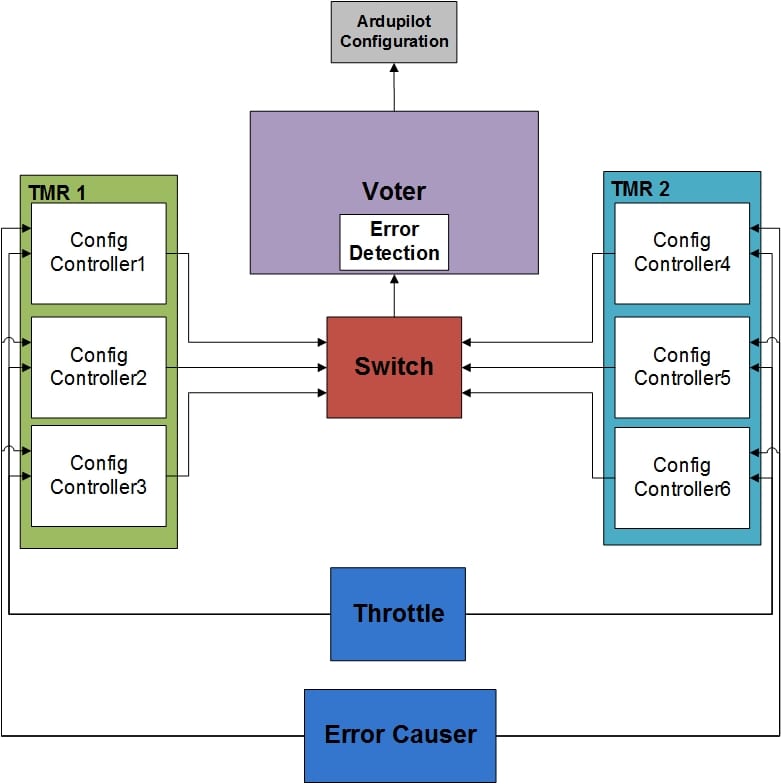
Fault Tolerance
The hexacopter’s six-rotor configuration provides inherent fault tolerance. The FPGA control layer monitors motor performance and can redistribute thrust distribution when a motor degrades, maintaining stable flight with up to one motor failure.